ArduPilot 笔记
1. ArduPilot SITL 编译
设置windows/Cygwin环境下git选项:
# 忽略权限位变化
git config --global core.fileMode false
# 信任当前目录
git config --global --add safe.directory /cygdrive/e/work/flight/ardupilot
# 关闭 CRLF 自动转换(避免与 Windows 工具冲突)
git config --global core.autocrlf false
下载 ArduPilot 代码:
git clone https://github.com/ardupilot/ardupilot.git
cd ardupilot
git submodule update --init --recursive
git submodule foreach --recursive "git reset --hard HEAD"
编译 ArduPilot SITL:
# 编译及开发环境准备
./Tools/environment_install/install-prereqs-ubuntu.sh -y
./waf configure --board sitl
./waf plane # ArduPlane
# 生成 build/sitl/bin/arduplane
1.1. 初步运行
使用自定义python脚本运行 SITLgithub – ap-swarm-launcher:
# 启动两个 ArduPlane SITL 实例,设置数据目录为 ~/tmp/arduplane
uv run ap-sitl-swarm --model plane -n 2 --data-dir ~/tmp/arduplane --no-multicast --tcp-base-port 5760 --home 31.8269,117.2280,30 ~/tmp/arduplane/arduplane
2. Windows上使用Cygwin编译
从cygwin 下载并安装setup-x86_64.exe。在cygwin环境中安装选择以下软件包:
autoconf automake ccache gcc-g++ git libtool make gawk libexpat-devel libxml2-devel python39 python39-future python39-lxml python39-pip libxslt-devel python39-devel procps-ng zip gdb ddd xterm cmake
另外,还需要安装如下软件包,以部分解决Cygwin中的终端启动不了的问题:
xterm xorg-server xinit font-util unifont-fonts
在cygwin环境中安装pip包:
# 确保pip已经安装并升级到最新版本
python3 -m ensurepip --default-pip
python3 -m pip install --upgrade pip
pip install pymavlink pyserial empy==3.3.4 MAVProxy pexpect lxml
在cygwin环境中编译(此时不需要也不能运行脚本install-prereqs-ubuntu.sh):
# 进入 ardupilot 根目录
# ./waf configure --board sitl --debug
# ./waf -j8 plane -v
./waf configure --board sitl
./waf plane
2.1. SITL 运行
运行sim_vehicle.py需要MAVProxy,首先需要从github上下载并安装MAVProxy。
在Cygwin环境中,没有支持的console输出的terminal,需要作一些设置或修改,以显示console输出窗口。有两种方式:使用X server,或者mintty终端。
首先,在cygwin中启动X Server(已弃用,可以不用启动):
startxwin &
export DISPLAY=:0
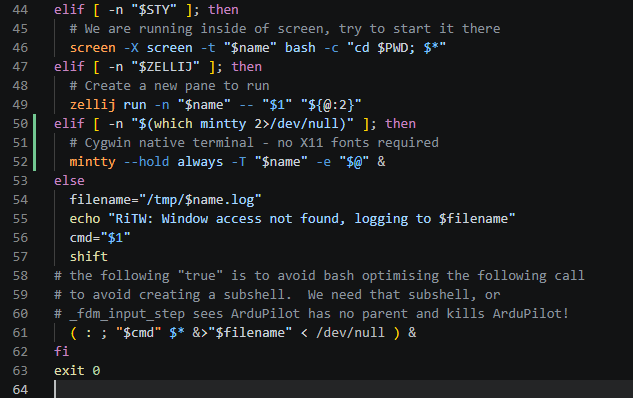
启动sim_vehicle.py前,需要修改Tools\autotest\run_in_terminal_window.sh脚本,添加mintty支持:
elif [ -n "$(which mintty 2>/dev/null)" ]; then
# Cygwin native terminal - no X11 fonts required
mintty --hold always -T "$name" -e "$@" &
然后,在cygwin环境中启动sim_vehicle.py:
cd /cygdrive/e/work/flight/ardupilot/ArduPlane
../Tools/autotest/sim_vehicle.py --map --console
启动之后,观察LOG信息:
SIM_VEHICLE: Run ArduPlane
SIM_VEHICLE: "/cygdrive/e/work/flight/ardupilot/Tools/autotest/run_in_terminal_window.sh" "ArduPlane" "/cygdrive/e/work/flight/ardupilot/build/sitl/bin/arduplane" "--model" "plane" "--speedup" "1" "--slave" "0" "--sim-address=127.0.0.1" "-I0"
SIM_VEHICLE: Run MavProxy
SIM_VEHICLE: "/usr/bin/cygstart" "-w" "mavproxy.exe" "--retries" "5" "--out" "127.0.0.1:14550" "--master" "tcp:127.0.0.1:5760" "--sitl" "127.0.0.1:5501" "--map" "--console"
RiTW: Starting ArduPlane : /cygdrive/e/work/flight/ardupilot/build/sitl/bin/arduplane --model plane --speedup 1 --slave 0 --sim-address=127.0.0.1 -I0
可以看到SITL通过TCP:5760端口与MAVProxy通信,MAVProxy通过TCP:14550端口与QGroundControl通信。
2.1.1. 更改SITL仿真的HOME坐标
在Tools\autotest\locations.txt文件中定义了一些预设的HOME坐标,默认加载HOME点是CMAC。可以通过NAME选择其他地点,比如:
../Tools/autotest/sim_vehicle.py -L Unalga --map --console
也可以在locations.txt中添加NAME+坐标。例如添加合肥坐标:
Hefei=31.8206,117.2272,27,0 #Hefei, Anhui, China (WGS84)
此时启动命令为:
../Tools/autotest/sim_vehicle.py -L Hefei --map --console
2.1.2. 命令交互–固定翼 ArduPlane
启动sim_vehicle.py之后,会启动一个console窗口、一个map窗口,以及一个terminal窗口。可以在terminal窗口中输入命令来控制仿真,比如:
# 在 cygwin 环境中,由于 MAVProxy 是在 windows 环境下安装的(不是在 cygwin 环境安装的),
# 所以 MAVProxy 命令接收的路径是 windows 的路径格式。
# 另外,可以使用相对路径,但是测试这种方式发现不可靠。
STABILIZE > wp load "E:\work\flight\ardupilot\Tools\autotest\Generic_Missions\CMAC-circuit.txt"
STABILIZE > mode guided
GUIDED > arm throttle
GUIDED > takeoff 40
GUIDED > mode auto
GUIDED >
GUIDED > mode rtl # 返航模式
# 自动降落返回HOME点
RTL > param set RTL_AUTOLAND 1
RTL > mode autoland
# 从 SITL / 飞控 下载航线文件,并更新 Map
mp list
具体操作步骤参考官方教程文档:Plane SITL/MAVProxy Tutorial。另外参考知乎文章:ArduPilot 软件在环仿真SITL(SITL+MAVProxy)。
- 当飞机处于
MISSION_RUNNING状态时(Armed + MISSION_RUNNING),不能接收航线修改命令。飞控接收新航线,会冲掉当前的航线。- 其他wp命令:
wp list、wp clear。- 航线文件格式参见官方文档:Plan File Format。
- txt格式文件格式:File Formats。
- sim_vehicle.py的使用:Using SITL。
如果使用我修改过的HOME地点Hefei,此时对应的航线文件Hefei-circuit.txt内容如下:
QGC WPL 110
0 0 0 16 0.000000 0.000000 0.000000 0.000000 31.820600 117.227200 27.000000 1
1 0 3 22 15.000000 0.000000 0.000000 0.000000 31.823705 117.226818 41.029999 1
2 0 3 16 0.000000 0.000000 0.000000 0.000000 31.823953 117.223507 100.000000 1
3 1 3 16 0.000000 0.000000 0.000000 0.000000 31.817075 117.224346 100.000000 1
4 0 3 16 0.000000 0.000000 0.000000 0.000000 31.817407 117.226696 100.000000 1
5 0 3 16 0.000000 0.000000 0.000000 0.000000 31.824266 117.225872 100.000000 1
6 0 3 177 2.000000 -1.000000 0.000000 0.000000 0.000000 0.000000 0.000000 1
7 0 3 16 0.000000 0.000000 0.000000 0.000000 31.824266 117.225872 100.000000 1
在mavProxy中,加载航线文件的命令为:
wp load d:\Hefei-circuit.txt
2.1.3. 参数文件
SITL启动时,都会加载默认的参数文件,比如plane的默认文件在代码仓库中的路径是Tools/autotest/models/plane.parm。运行sim_vehicle.py时,可以通过加载自定义参数文件来修改/添加SITL的仿真参数,比如使用如下命令加载用户自定义的参数文件:
../Tools/autotest/sim_vehicle.py --map --console --param-file my_params.parm
参数文件my_params.parm内容:
# 查看当前参数
param show
# 修改特定参数
param set BATTERY_CAPACITY 5200
param set SIM_SPEEDUP 2
2.1.4. 有关SITL仿真的资源
- Copter SITL/MAVProxy Tutorial:使用
sim_vehicle.py的一个官方文档。 - SITL setup on Windows using Cygwin (not recommended)
2.1.5. 启动仿真以及连接QGroundControl
QGC创建一个UDP:14550端口的连接,连接到MAVProxy的TCP:14550端口。MAVProxy会将SITL的数据转发给QGC。
2.1.6. Cygwin终端美化
编辑Cygwin的.bashrc文件(比如在windows中绝对路径为C:\cygwin64\home\Administrator\.bashrc):
###################
## Git completion and prompt
source git-completion.bash
source git-prompt.sh
# Git prompt 状态标记
GIT_PS1_SHOWDIRTYSTATE=1 # * 未暂存变更,+ 已暂存变更
GIT_PS1_SHOWUNTRACKEDFILES=1 # ? 未追踪文件
GIT_PS1_SHOWUPSTREAM="auto" # < 落后,> 超前,<> 分叉
# PS1: 蓝色目录名(basename) + 黄色 git 状态 + 普通 $
PS1='\[\e[1;34m\]\W\[\e[0m\]\[\e[1;33m\]$(__git_ps1 " (%s)")\[\e[0m\] \$ '
################
# 目录导航别名
alias ..='cd ..'
alias ...='cd ../..'
alias c='clear'
alias h='history'
alias ll='ls -alF'
alias la='ls -A'
alias l='ls -CF'
alias grep='grep --color'
其中,git-completetion.bash以及git-prompt.sh来自https://github.com/git/git/tree/master/contrib/completion。
参考:
- Bash Prompt Generator:在线生成 PS1
- Configuration CYGWIN - BASHRC:参考的Cygwin command prompt代码片段
2.2. SITL 与 JSBSim
在Cygwin环境中,编译并安装JSBSim:
git clone git://github.com/JSBSim-Team/jsbsim.git
cd jsbsim && mkdir build && cd build
cmake -DSYSTEM_EXPAT=ON -DBUILD_SHARED_LIBS=ON -DINSTALL_JSBSIM_PYTHON_MODULE=ON -DCMAKE_CXX_FLAGS_RELEASE="-O3 -march=native -mtune=native" -DCMAKE_C_FLAGS_RELEASE="-O3 -march=native -mtune=native" -DCMAKE_BUILD_TYPE=Release ..
make -j8 && make install
cmake --install . --component pymodules
编译命令参考:https://github.com/JSBSim-Team/jsbsim/blob/master/doc/DevelopersDocs.md。
启动仿真命令:
../Tools/autotest/sim_vehicle.py -v ArduPlane -f jsbsim --console --map
A. 资料
A.1. 一些地面站收集
- ADOSMissionControl:一个基于typescript的地面站
- Qt AI Skills:QtCompany 发布的Qt/QML 开发 skills
- Manual client setup:Qt/QML开发 MCP 安装指南,适用于 CodeX、antigravity、Claude Code。
Enjoy Reading This Article?
Here are some more articles you might like to read next: