APM/Pixhawk常用飞行模式
APM/Pixhawk常用飞行模式
1. 多旋翼:手动飞行模式
如下几种飞行模式是手动控制模式,即受遥控器控制:
- Stabilize(稳定模式/姿态模式)
- Altitude(定高模式)
- Position(定点模式)
- Offboard(板外模式/指令模式)
1.1. Stabilize:稳定模式(姿态模式)
俯仰、横滚摇杆控制飞机对应的角度(注意是角度);油门控制飞机的上升/下降速度,以及其他轴的移动速度(注意是速度,类似汽车油门);偏航控制飞机的旋转速率(水平方向)。
当摇杆回到中立位置时,飞机会自动保持当前的姿态(俯仰角0,横滚角0,偏航角0)和高度。但不会自动保持位置:可能会朝着风力的方向漂移,此时需要控制油门以保持高度。
资料:
1.2. Altitude:定高模式
定高模式与稳定模式类似:俯仰、横滚摇杆控制飞机的角度。但是油门控制逻辑是:油门摇杆以预定的最大速率(和其他轴上的移动速度)控制上升速度。
- 当摇杆归中之后,如果飞机在水平方向飞行,则持续运动,直到被风的阻力减速停下。如果刮风,飞机会朝着风的方向漂移。
- 高度保持依赖传感器(气压计或激光测距仪等)来维持高度。
资料:
1.3. Position:定点模式
横滚、俯仰摇杆分别控制飞机在左右和前后方向上的地面水平加速度。油门摇杆控制飞机的上升/下降速度。偏航摇杆控制飞机的旋转速率(水平面方向)。
当摇杆回到中立位置时,飞机会自动保持当前位置和高度,但不保持当前方向(当有外力改变水平朝向之后,会保持新的角度)。
依赖GPS获取绝对位置,以及磁罗盘获取航向。如果这两个组件有失效,则不能进入该模式;如果在该模式下失效,则进入失效处理。
资料:
1.4. Offboard:板外模式/指令模式
指令控制模式,即通过地面站发送切换指令:
- 切换指令需要带位置、偏航角等参数;
- 需要按指定周期发送指令,否则会触发失效处理。
2. 多旋翼:自动飞行模式
TBD
3. 摇杆
遥控器摇杆控制:俯仰(pitch)、横滚(roll)、偏航(yaw)、油门(throttle):
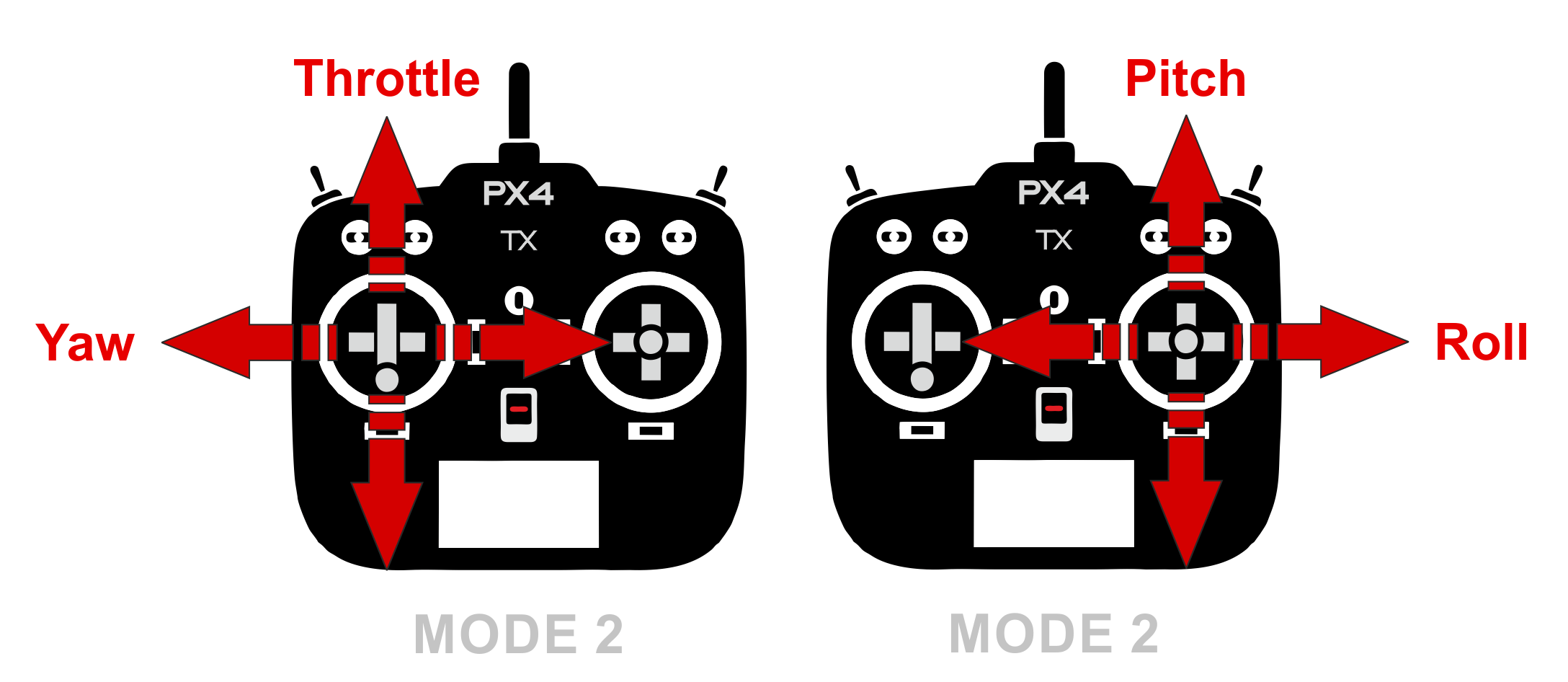
对应的飞机运动:
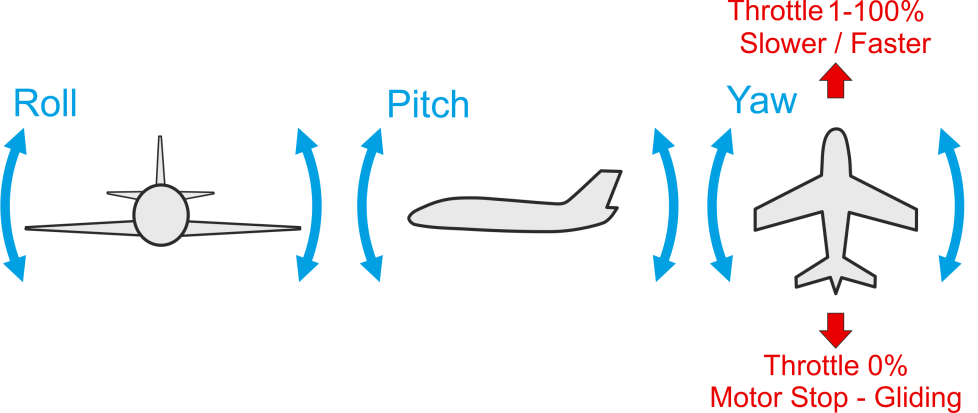
- 俯仰 => 上升/下降。
- 横滚 => 向左/右倾斜并转弯。
- 偏航 => 机尾向左/右转动并转弯。
- 油门 => 改变前进速度。
以上指固定翼飞机,其他类型飞机类似。
资料:
参考资料
- PX4 Guide – PX4多旋翼无人机飞行模式(Flight Mode)
- APM/Pixhawk常用飞行模式讲解:http://www.nufeichuiyun.com/?p=1128
- 【无人机】多旋翼无人机控制器架构,PX4控制器,PID控制
- 开放航空航天仿真工具集锦
本文由作者按照 CC BY 4.0 进行授权