QGC代码架构解析:QGC初始加载及状态机
在收到飞机发来的心跳包后,消息发送给MultiVehicleManager,在MultiVehicleManager中,检查组件ID是否是MAV_COMP_ID_AUTOPILOT1,以及vehicleType不是GCS等之后,会创建一个Vehicle对象,并进入初始化流程。
mavlink_message_t中已经包含了sysid、compid信息。而心跳包mavlink_heartbeat_t中则包含了vehicleType、firmwareType等信息。
需要注意的是,与飞控通信中,组件ID是固定的:
MAV_COMP_ID_AUTOPILOT1,即每个飞控的组件ID都是1。
飞机发现、创建及初始化流程如下图所示: 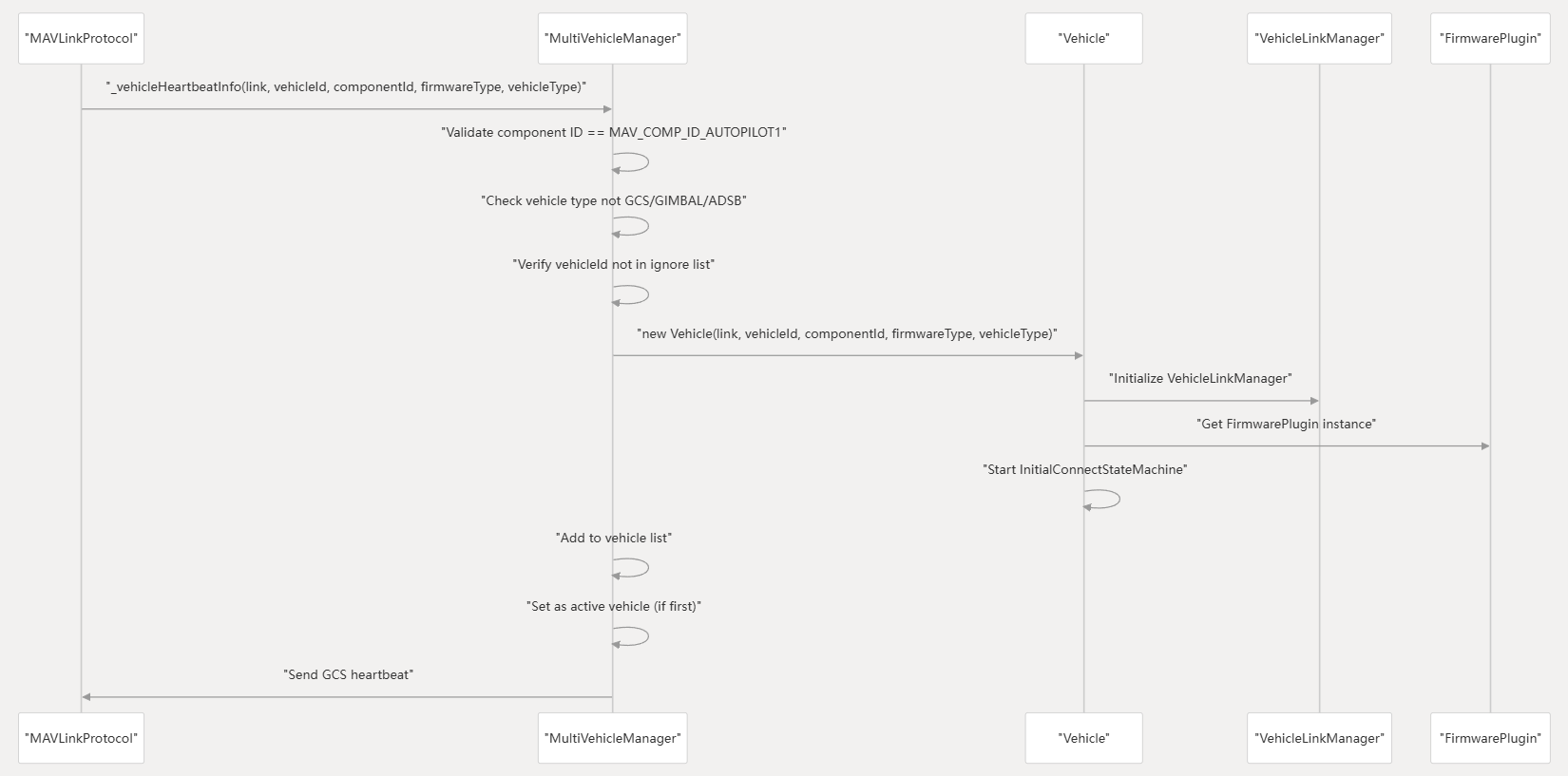
主要初始流程入口在InitialConnectStateMachine中以状态机实现,且部分子流程也是以状态机实现(至多嵌套了三层状态机):
由于获取信息需要使用同步方式,在
InitialConnectStateMachine状态机中,使用回调方式处理应答Ack,在回调中进入下一个处理阶段。参见:1. 请求的实现,以及模拟同步请求。
1
2
3
4
5
6
7
8
9
10
static constexpr const StateMachine::StateFn _rgStates[] = {
_stateRequestAutopilotVersion,
_stateRequestStandardModes,
_stateRequestCompInfo,
_stateRequestParameters,
_stateRequestMission,
_stateRequestGeoFence,
_stateRequestRallyPoints,
_stateSignalInitialConnectComplete
};
1. 请求的实现,以及模拟同步请求
请求飞机信息,使用MAV_CMD_REQUEST_MESSAGE命令字,请求对应的消息ID(即子命令,比如请求飞机版本信息MAVLINK_MSG_ID_AUTOPILOT_VERSION),以及子命令的参数。另外,使用命令MAV_CMD_SET_MESSAGE_INTERVAL让飞机定期周期响应子命令消息。
飞机端收到MESSAGE消息之后,先返回一个响应Ack(Ack中包含msgid,以及响应码,比如MAV_RESULT_ACCEPTED)。QGC收到该消息,继续处理之前发送的请求,实现代码主要有两个函数入口:Vehicle::requestMessage,Vehicle::_handleCommandAck(mavlink_message_t& message),以及一个主要的数据成员QMap<int, QMap<int, RequestMessageInfo_t*>> _requestMessageInfoMap。
MAV_CMD_REQUEST_MESSAGE消息的文档:How to Request & Stream Messages。处理流程示例:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
你的程序 飞控
| |
| 1. 发送 MAV_CMD_SET_MESSAGE_INTERVAL
|----------------------------------------→ (请求:以1Hz发送BATTERY_STATUS)
|
| | 处理请求
| 2. 接收 COMMAND_ACK
|←---------------------------------------- (确认已接受)
|
| 3. 等待 BATTERY_STATUS
|
| | 自动发送电池信息(周期: 1秒)
| ← 接收 BATTERY_STATUS #1 |
| ← 接收 BATTERY_STATUS #2 | (自动循环,无需请求)
| ← 接收 BATTERY_STATUS #3 |
| ← 接收 BATTERY_STATUS #4 |
2. 请求飞机版本信息(MAVLINK_MSG_ID_AUTOPILOT_VERSION)
主要获取飞机的编号、固件的vender_id、product_id,固件版本信息,以及capabilities(64位bitmask),capabilities相关枚举定义在MAVLink协议的MAV_PROTOCOL_CAPABILITY中。
3. 请求飞机标准模式(MAVLINK_MSG_ID_AVAILABLE_MODES)
主要获取飞机支持的标准模式。获取的模式列表用于设置给FirmwarePlugin,并在Vehicle中使用。
4. 请求组件元数据(META)信息
由于这一步请求处理多个类型META数据文件,整个处理放在单独的模块(源码文件)ComponentInformationManager中,且也使用状态机来实现:请求General元数据、Param元数据、Events元数据、Actuator元数据。General是指组件的信息(主要是飞控自身),而Events,Actuator不一定每个组件都有。
请求每个子分类的META数据,分为几个步骤(还是用状态机实现),在RequestMetaDataTypeStateMachine中实现:请求数据文件的地址URI(返回URI,以及CRC),根据URI请求META数据文件内容(具有缓存功能,先比较CRC,不相等再请求远程META文件),即数据类型描述文件。比如下一个步骤请求飞机的参数信息,就需要将请求到的参数生成Fact,而Fact的类型信息就来自于参数的META数据文件。
在请求
META数据文件的过程中,定义了两个数据类:1.struct CompInfo::Uris:存放META文件的URI,CRC,以及其他一些信息(如Fallback请求信息)。2.CompInfo,以及继承自CompInfo的上述几种META文件对应的子类:CompInfoGeneral,CompInfoParam,CompInfoEvents,CompInfoActuators。其中最重要也是首先需要请求的META文件是CompInfoGeneral,因为这个文件里面包含了设备支持的META文件类型列表(数据成员QMap<COMP_METADATA_TYPE, Uris> _supportedTypes;)。后续几个请求,要先检查设备是否支持该类型的META文件。
在
ComponentInformationManager中,维护了一个QMap<uint8_t /* compId */, QMap<COMP_METADATA_TYPE, CompInfo*>> _compInfoMap;,用于存放每个组件的各类META文件对象。这与上面所述的逻辑连接起来。
Events是MAVLink协议中的一个系统事件和诊断机制,用于飞机端向地面站实时报告系统事件、警告和错误。相关文档:Events Interface (WIP)。比如可能有如下事件:
1
2
3
4
5
6
7
飞机端事件流:
├─ 电池低电量事件
├─ GPS 信号丢失事件
├─ IMU 过热警告
├─ 传感器校准失败
├─ 电机故障检测
└─ 健康检查失败 (Health & Arming Checks)
4.1. META数据使用流程
请求到的META数据文件,主要用于创建FactMetaData对象,进而创建Fact对象。以请求参数的META数据文件为例,流程如下所示:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
┌───────────────────────────────────────────────────┐
│ 飞机端 (Autopilot) │
└───────────────────────────────────────────────────┘
│
│ MAVLink
│
┌─────────────▼──────────────┐
│ ComponentInformation │
│ ┌──────────────────────┐ │
│ │ COMP_METADATA_TYPE │ │
│ │ _PARAMETER │ │
│ │ (JSON 文件 URI) │ │
│ └──────────────────────┘ │
└─────────────┬──────────────┘
│ 下载 JSON
│
┌─────────────▼──────────────┐
│ CompInfoParam.setJson() │
│ (解析 JSON 文件) │
└─────────────┬──────────────┘
│
┌─────────────▼──────────────────────────────┐
│ FactMetaData::createFromJsonObject() │
│ (将 JSON 转换为 FactMetaData 对象) │
└─────────────┬──────────────────────────────┘
│
┌─────────────▼──────────────────────────────┐
│ ParameterManager │
│ _nameToMetaDataMap[paramName] │
│ (存储所有参数的元数据) │
└────────────────────────────────────────────┘
代码执行流程:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
// 1️⃣ 初始化连接时,请求参数的元数据
_stateRequestCompInfoEvents()
└─► _requestTypeStateMachine.request(
_compInfoMap[MAV_COMP_ID_AUTOPILOT1][COMP_METADATA_TYPE_PARAMETER]
);
// 2️⃣ 下载 JSON 文件后,调用 setJson()
CompInfoParam::setJson(const QString& metadataJsonFileName)
{
// 3️⃣ 解析 JSON 文件
QJsonDocument jsonDoc = // 从文件读取
QJsonArray rgParameters = jsonDoc["QGC_PARAMETERS"].toArray();
// 4️⃣ 为每个参数创建 FactMetaData 对象
for (QJsonValue parameterValue : rgParameters) {
FactMetaData* newMetaData =
FactMetaData::createFromJsonObject(parameterValue.toObject(), ...);
// 5️⃣ 存储到 map 中
_nameToMetaDataMap[newMetaData->name()] = newMetaData;
}
}
// 6️⃣ 后续使用时
FactMetaData* meta = _compInfoParam->factMetaDataForName("PARAM_NAME");
// 使用 meta 来验证、转换参数值
4.2. 对应的 MAVLink 服务
请求META数据使用微服务Component Metadata Protocol (WIP),命令字:MAVLINK_MSG_ID_COMPONENT_METADATA。针对各个META数据类型,提供了枚举定义COMP_METADATA_TYPE。
请求流程图如下所示:
sequenceDiagram;
participant Client
participant Server
Note over Server, Client: Client: Request component information.
Client->>Server: MAV_CMD_REQUEST_MESSAGE(param1=397)
Client-->>Client: Start ACK receive timeout
Server->>Client: CMD_ACK
Server->>Client: COMPONENT_METADATA( uri, file_crc)
Note over Server, Client: Client check file at uri has changed (using CRC in file_crc).
Note over Server, Client: Client download file at uri using MAVFTP and parse.
Note over Server, Client: Client download other metadata types referenced in general metadata<br> (from device or Internet).
5. 请求系统参数列表
这个步骤请求飞机的所有参数,使用MAVLink的微服务Parameter Protocol,在QGC的ParameterManager模块中实现,见上一篇QGC代码架构解析:MAVLink参数服务及QGC参数管理模块。
请求参数,依赖于上一步骤,即请求的参数META数据文件,用于创建参数对应的FactMetaData对象。
6. 请求任务列表(航点列表)
这个步骤使用Mission Protocol,直接调用PlanManager::loadFromVehicle下载飞机航点信息,进行初始化同步。具体参考下一篇QGC代码架构解析:MAVLink Mission Protocol,以及 QGC 航点管理。
由于MAVLink v2中,Mission Protocol不仅仅包含航点,还包含地理围栏(GeoFence)、降落点(Rally Points)等信息。所有这些部分都实现在PlanManager以及其继承子类中。
7. 请求地理围栏列表
参考6。
8. 请求降落点列表
参考6。
9. 初始化完成
完成初始化,发送signal,通知QML界面。