QGC代码架构解析:MAVLink Mission Protocol,以及 QGC 航点管理
本文厘清如下几个问题:
- 航点协议(
Mission Protocol)有哪些命令/消息; - 微服务的处理流程,以及流程中通信双方使用到的命令ID/请求ID-响应ID;
- 带参数的命令/消息,其参数格式,以及单位;
- 航点文件格式。
1. MAVLink Mission Protocol
航点协议主要实现航点集合的上传、下载、清除。另外有一些其他消息,以及附带的参数/枚举。
航点上传/下载使用到如下几个消息定义:
| 消息名称 | 说明 | 发送方 |
|---|---|---|
| MISSION_REQUEST_LIST | 启动航点集下载动作 | 地面站 |
| MISSION_COUNT | 航点数量 | 地面站/飞控 |
| MISSION_REQUEST_INT | 请求航点 | 地面站/飞控 |
| MISSION_ITEM_INT | 请求航点 | 飞控/地面站 |
| MISSION_ACK | 航点响应 | 飞控/地面站 |
1.1. 航点的上传/下载流程
航点上传/下载流程图(左边为QGC请求下载,右边为QGC请求上传):
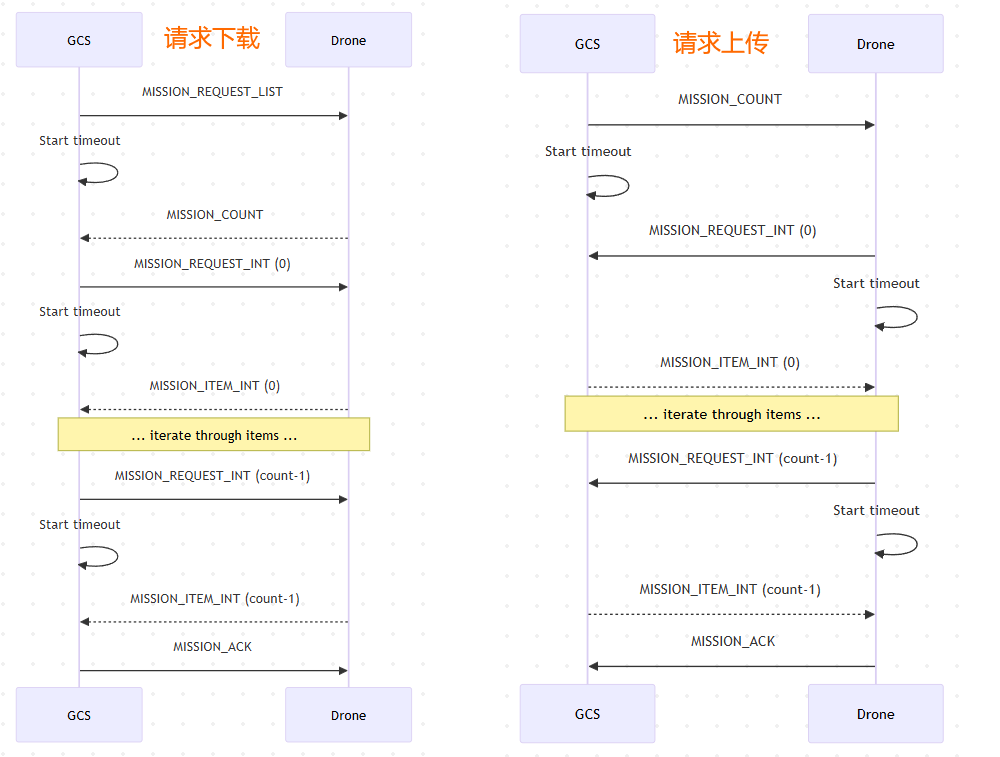
对比发现规律:
QGC请求下载时,使用MISSION_REQUEST_LIST来启动,而请求上传时,使用MISSION_COUNT来启动(注意:不论上传/下载,都是QGC发起的);MISSION_COUNT既可以作为飞控响应QGC的下载请求,也可以作为QGC请求飞控上传航点的启动消息;- 启动之后,中间航点的请求,双方使用
MISSION_REQUEST_INT<–>MISSION_ITEM_INT配对,即一个完整的单个航点传输流程。航点发送方使用MISSION_REQUEST_INT请求,接收方使用MISSION_ITEM_INT响应。 - 最后使用
MISSION_ACK作为结束标示。在这里,ACK消息的含义是结束,即整个流程结束了,这样理解更合理。 - 从文档看,
MISSION_ACK只用在上传/下载流程里面。其他消息里面没有使用到。
上传/下载的流程,不具有对称性,给理解带来了一定的混乱。流程步骤在语义上理解也不顺畅。
1.1.1. 协议实现注意事项
- 在流程图的
Start timeout处,需要实现超时重传机制:MISSION_REQUEST_LIST超时没有响应,重传该命令若干次;MISSION_COUNT超时没有响应,重传该命令若干次;MISSION_REQUEST_INT超时没有响应,重传该命令若干次;
MISSION_REQUEST_INT请求的航点,需要按序号顺序请求以及应答。如果收到的MISSION_ITEM_INT中的航点顺序不对,需要丢弃该航点数据,并重新请求。- 当上传/下载航点时,飞机会返回一个
opaque_id(类似整个航点集合计算得到的哈希),用于避免不不必要的再次上传/下载。当QGC上传时,飞机在最后一个消息返回该值:MISSION_ACK.opaque_id。当QGC下载时,飞机在MISSION_COUNT中返回该值:MISSION_COUNT.opaque_id。 - 当上传/下载的过程中失败时(对方提前返回
MISSION_ACK并包含错误消息),QGC或者飞机应该终止当前流程,并恢复使用上一次的航点集。 - 协议没有说明,上传过程中,最后一步,如果飞机没有返回
MISSION_ACK,应该如何处理。QGC的实际处理方式是,认为上传成功并完成,但是opaque_id没有更新。
1.2. 航点消息结构:消息 MISSION_ITEM_INT,以及 MAV_CMD
航点不仅仅只有坐标等数据,还包含动作含义,即MAV_CMD其实是一个命令+参数数据。MISSION_ITEM_INT就是用于发送这些MAV_CMD子命令+参数的。MAV_CMD分为如下几类:
MAV_CMD_NAV_*:导航类命令(起飞、降落、返回RTL、悬停、飞到指定航点位置),比如MAV_CMD_NAV_WAYPOINT表示普通航点,MAV_CMD_NAV_LOITER_UNLIM表示无限悬停等。MAV_CMD_DO_*:动作类命令,比如MAV_CMD_DO_CHANGE_SPEED表示改变速度,MAV_CMD_DO_SET_RELAY表示设置继电器等;MAV_CMD_CONDITION_*:命令执行条件,比如MAV_CMD_CONDITION_DELAY表示等待一段时间之后,再执行下一个航点MAV_CMD。从Ardupilot文档看,MAV_CMD_CONDITION_*命令是作用于MAV_CMD_DO_*命令,参考Ardupilot – Mission Commands – Conditional commands。
主要的MAV_CMD_NAV命令列表:
| Command ID | Name | Description |
|---|---|---|
| 16 | MAV_CMD_NAV_WAYPOINT | Navigate to a specific waypoint |
| 21 | MAV_CMD_NAV_LAND | Land at the specified location |
| 22 | MAV_CMD_NAV_TAKEOFF | Take off and ascend to specified altitude |
| 20 | MAV_CMD_NAV_RETURN_TO_LAUNCH | Return to launch/home location |
| 80 | MAV_CMD_NAV_ROI | Sets region of interest for camera |
| 82 | MAV_CMD_NAV_SPLINE_WAYPOINT | Navigate using a spline path |
所有MAV_CMD命令的完整列表,以及参数,可以参考MAVLink协议文档:Commands (MAV_CMD)。
1.3. 航点命令的参数:MISSION_ITEM_INT的参数:Frame(坐标系)
在使用MISSION_ITEM_INT消息发送航点命令(Mission Item)时(包括MAV_CMD_NAV_*命令,以及MAV_CMD_DO_*命令),需要指定坐标系frame,比如WGS84坐标系,NED坐标系,或者在WGS84坐标系的修改,如高度改为相对HOME点高度,或者地形高度。坐标系枚举定义见:MAV_FRAME。
官方文档整理下来,有关Frame的描述,没有完全讲清楚,整个MAVLink协议中,有若干个命令使用到Frame作为参数。常见的需要使用到Frame的命令:
Mission Protocol中少量MAV_CMD_DO。COMMAND_INT需要使用Frame作为命令参数:Command Protocol。
根据文档描述,针对MISSION_ITEM_INT,目前APM以及PX4仅支持global类型的Frame,见文档描述Mission Items (MAVLink Commands)。另外,有少量的MAV_CMD_DO命令,里面也带有frame参数,很奇怪,有些混乱。
更多信息:
- MAVLink – Frames & Positional Information
- Ardupilot – Navigation commands
- MAVLink – Commands (MAV_CMD)
- MAVLink – MISSION_ITEM_INT (73)
1.4. 航点命令的参数:MISSION_ITEM_INT的参数:param1 ~ param7
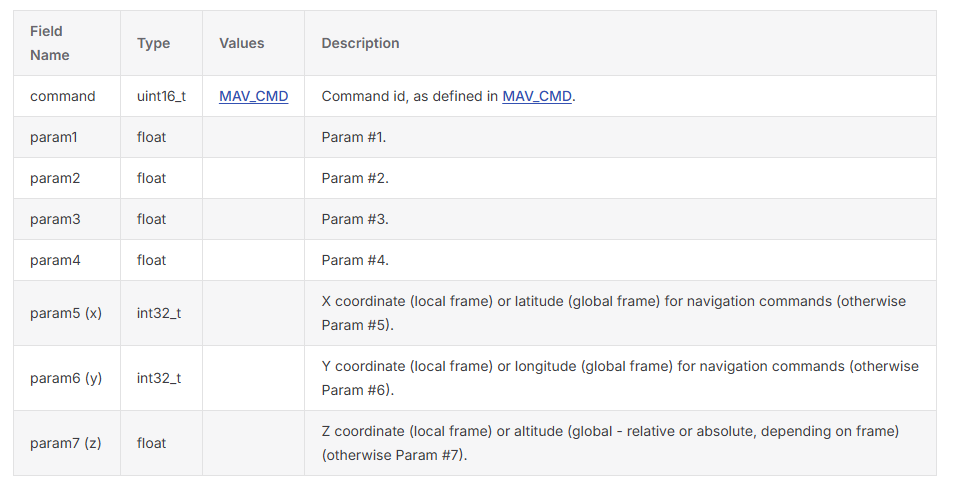
前四个参数param1 ~ param4,具体含义,以及单位,由具体的MAV_CMD命令决定,且数据类型就是float,即如果是其他类型,需要static_cast转换为float。
针对MAV_CMD_NAV命令,则是坐标信息,其中param5、param6(经纬度)是全局坐标,即1e7。高度参数param7,其含义由frame指定(但应该全部都是global类型的),global坐标系列表:
MAV_FRAME_GLOBAL_INT,MAV_FRAME_GLOBAL_RELATIVE_ALT_INT,MAV_FRAME_GLOBAL_TERRAIN_ALT,MAV_FRAME_GLOBAL_TERRAIN_ALT_INT,MAV_FRAME_GLOBAL。
另外,如果frame是MAV_FRAME_MISSION,表示这param5 ~ param7不是坐标,所以实现发送/接收的时候,不需要将param5 ~ param7乘以1e7。
根据协议,如果是frame的类型是local的,则发送/接收的时候param5、param6的精度应该是1e4,单位是米(参考协议文档Frames & Positional Information)。
总结:协议实现的时候:
- 如果
frame是MAV_FRAME_MISSION:则param5、param6按原样发送值,可能需要static_cast<int>转换。 - 如果
frame是global类型的:则param5、param6需要乘以1e7进行发送,接收时需要除以1e7。 - 如果
frame是local类型的:则param5、param6需要乘以1e4进行发送,接收时需要除以1e4。 - 其他
param1~param4,以及param7,按原样发送/接收,可能需要static_cast<float>转换。
另外,这个规则,应该也适用于COMMAND_INT命令COMMAND_INT。且:
- 使用
COMMAND_INT命令时,有些参数没有使用到,部分样例参考:ardupilot – Commands supported by Copter - 这些浮点类型的参数,值
nan也有有意义的,比如维持原值,具体搜索QGC代码中qQNaN()的使用地方。
1.5. 航点管理中其他命令/消息
如下两个消息,用来监控航点执行进度及状态:
MISSION_CURRENT:当前航点改变通知消息,由飞控广播,其他信息:序号seq,一起当前飞机航点状态,比如是否是暂停等。MISSION_ITEM_REACHED:与MISSION_CURRENT类似,QGC中没有处理该消息。
清除航点使用消息:MISSION_CLEAR_ALL。
2. QGC 航点管理实现
PlanManager实现Mission Protocol的协议。由于MAVLink v2中将航点(flight plans)、地理围栏(geofences)、降落点(rally/safe points)都放在Mission Protocol中,在请求上传(MISSION_COUNT)/下载(MISSION_REQUEST_INT),以及传输(MISSION_ITEM_INT)时,带有MAV_MISSION_TYPE字段,确定是哪种Mission Type,参考协议文档:Mission Protocol – Mission Types。
MissionManager:拓展航点的协议MAV_MISSION_TYPE_MISSION的固件实现:主要实现Ardupilot相关的实现,以及一些功能。GeoFenceManager:实现MAV_MISSION_TYPE_FENCE。RallyPointManager:实现MAV_MISSION_TYPE_RALLY。
2.1. 航点协议上传/下载功能的实现
PlanManager使用状态机实现上传/下载流程。定义一个TransactionType_t枚举,表示当前的事务类型,以及一个AckType_t表示期望的ACK类型:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
typedef enum {
AckNone, ///< State machine is idle
AckMissionCount, ///< MISSION_COUNT message expected
AckMissionItem, ///< MISSION_ITEM expected
AckMissionRequest, ///< MISSION_REQUEST is expected, or MISSION_ACK to end sequence
AckMissionClearAll, ///< MISSION_CLEAR_ALL sent, MISSION_ACK is expected
AckGuidedItem, ///< MISSION_ACK expected in response to ArduPilot guided mode single item send
} AckType_t;
typedef enum {
TransactionNone,
TransactionRead,
TransactionWrite,
TransactionRemoveAll
} TransactionType_t;
请求下载入口函数:PlanManager::loadFromVehicle,请求上传入口函数:PlanManager::writeMissionItems(const QList<MissionItem*>& missionItems)。以及一个handle函数,用于处理收到的消息:
PlanManager::_handleMissionCount:处理MISSION_COUNT消息(请求下载);PlanManager::_handleMissionItem:处理MISSION_ITEM_INT消息(请求下载);PlanManager::_handleMissionRequestInt:处理MISSION_REQUEST_INT消息(请求上传);
PlanManager中,有两个函数处理ACK消息:_handleMissionAck,_ackTimeout,这两个函数驱动状态机的流转:判断ACK与请求步骤是否匹配,发送一下一个航点数据/请求下一个航点数据,以及结束流程。
2.2. 其他模块
MissionItem:表示单个航点数据结构,航点管理模块的基础数据类。MissionController:提供QML接口访问航点数据。PlanMasterController:航点管理模块的顶层控制类(入口),提供QML接口访问航点(MissionController)、电子围栏(GeoFenceController)、降落点(RallyPointController)。以及从文件中加载/保存(包含kml文件格式)。MissionCommandTree:提供MAV_CMD命令树结构,供QML界面使用。
2.3. 航点文件格式
QGC中,航点文件格式使用JSON格式,文件扩展名为.plan,保存目录样例:
1
C:\Users\Administrator\Documents\QGroundControl Daily\Missions
保存时,将航点数据、电子围栏数据、降落点数据,保存到同一个文件中。保存及加载函数入口:
1
2
3
4
5
PlanMasterController::saveToJson();
MissionController::save(QJsonObject& json);
// 加载实现
bool _loadJsonMissionFileV2(const QJsonObject& json, QmlObjectListModel* visualItems, QString& errorString);
另外还可以导出/导入kml格式的航点文件,记录的字段格式有所不同,另外测试发现加载有些BUG。
航点有SimpleItem,以及ComplexItem,一个简单的航点文件样例:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
{
"fileType": "Plan",
"version": 1,
"groundStation": "QGroundControl",
"mission": {
"cruiseSpeed": 5,
"hoverSpeed": 3,
"items": [
{
"AMSLAltAboveTerrain": null,
"autoContinue": true,
"command": 16,
"frame": 3,
"params": [0, 0, 0, null, 47.397742, 8.545594, 488],
"type": "SimpleItem"
},
{
"AMSLAltAboveTerrain": null,
"autoContinue": true,
"command": 16,
"frame": 3,
"params": [0, 0, 0, null, 47.397825, 8.545632, 488],
"type": "SimpleItem"
}
]
}
}
有关航点文件格式的更多信息,参考QGC代码仓库文档: